快速开始
SANPO 机器人集成开发板标准版面向机器人关节电机控制、总线通信与传感器接入场景,支持 USB、SPI、串口、SocketCAN等多种上位机控制方式,兼容 CAN/RS485 关节电机协议 (V6 版本增加FDCAN支持),并提供离线执行、固件更新和二次开发能力。
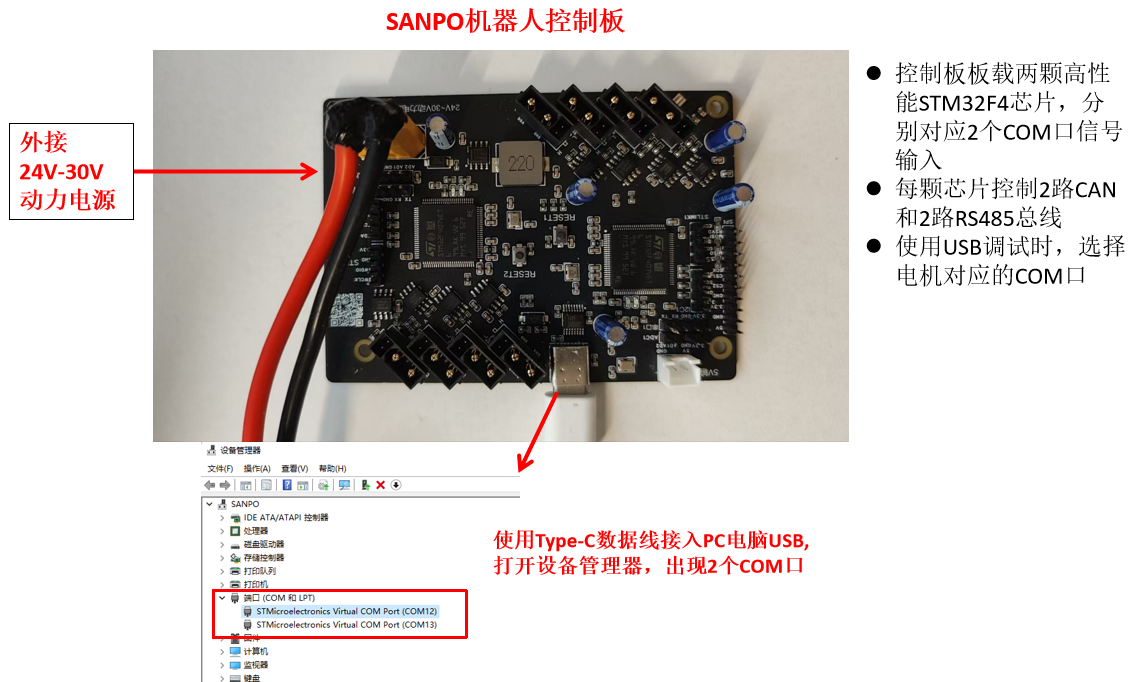
出厂固件版本说明:SANPO 集成开发板标准版、隔离版(CAN) 和隔离版(RS485) 基于 STM32F407 平台开发,预装 V4 固件。FDCAN 升级版基于 STM32G473 平台开发,预装 V6 固件。
文档适用范围:标准版、隔离版(CAN) 和隔离版(RS485) 请使用本文档;FDCAN 升级版用户请访问 V6 版本说明文档。
本文用于帮助你快速了解开发板、硬件接口、接入方式、调试工具以及协议与固件入口。
产品概览
同时提供 4 路独立 CAN 和 4 路独立 RS485。
电机系统供电范围 0V~58V。
控制系统支持 USB、5V 接线座或上位机 5V GPIO 供电。
可对外提供 0V~58V 和 3.3V 电源输出。
适合 CAN / RS485 混合总线调试、功能验证和快速集成开发。
主要规格
项目 |
参数 |
|---|---|
处理器 |
双路高性能 STM32 MCU |
控制方式 |
USB / SPI / 串口 / SocketCAN |
设备总线 |
4 路独立 CAN + 4 路独立 RS485 |
电机系统供电 |
6V~58V |
控制系统供电 |
USB、5V 接线座、上位机 5V GPIO |
输出电源 |
6V~58V / 3.3V |
电源瞬时脉冲 |
峰值 1.5kW,钳位电压 93V |
适用场景
CAN / RS485 混合总线调试。
机器人关节电机功能验证。
原型开发与快速集成。
设计说明
电机在启动、急停、换向等工况下,会产生明显的共模干扰、地电位波动、回生能量和瞬态脉冲。开发板具备电源瞬时脉冲应对能力,峰值 1.5kW,钳位电压 93V,可覆盖常见机器人关节系统的瞬态冲击场景。
主要能力
采用双路高性能 STM32 MCU 控制架构,支持多路关节电机并行控制。
支持 USB、SPI、串口和 SocketCAN 等多种上位机控制输入方式。
支持 CAN / RS485 关节电机协议接入。
支持 SocketCAN(gs_usb),可在 Linux 主机上直接使用 can-utils 或 SocketCAN API 收发经典 CAN 报文。
支持脱机执行与任务调度,可用于批量动作下发和离线运行。
支持 IIC、ADC、串口类传感器扩展,便于接入姿态、压力等外设。
支持通过 SWD 接口进行固件下载、更新和二次开发。
兼容 MIT Cheetah SPINE 设计思路。
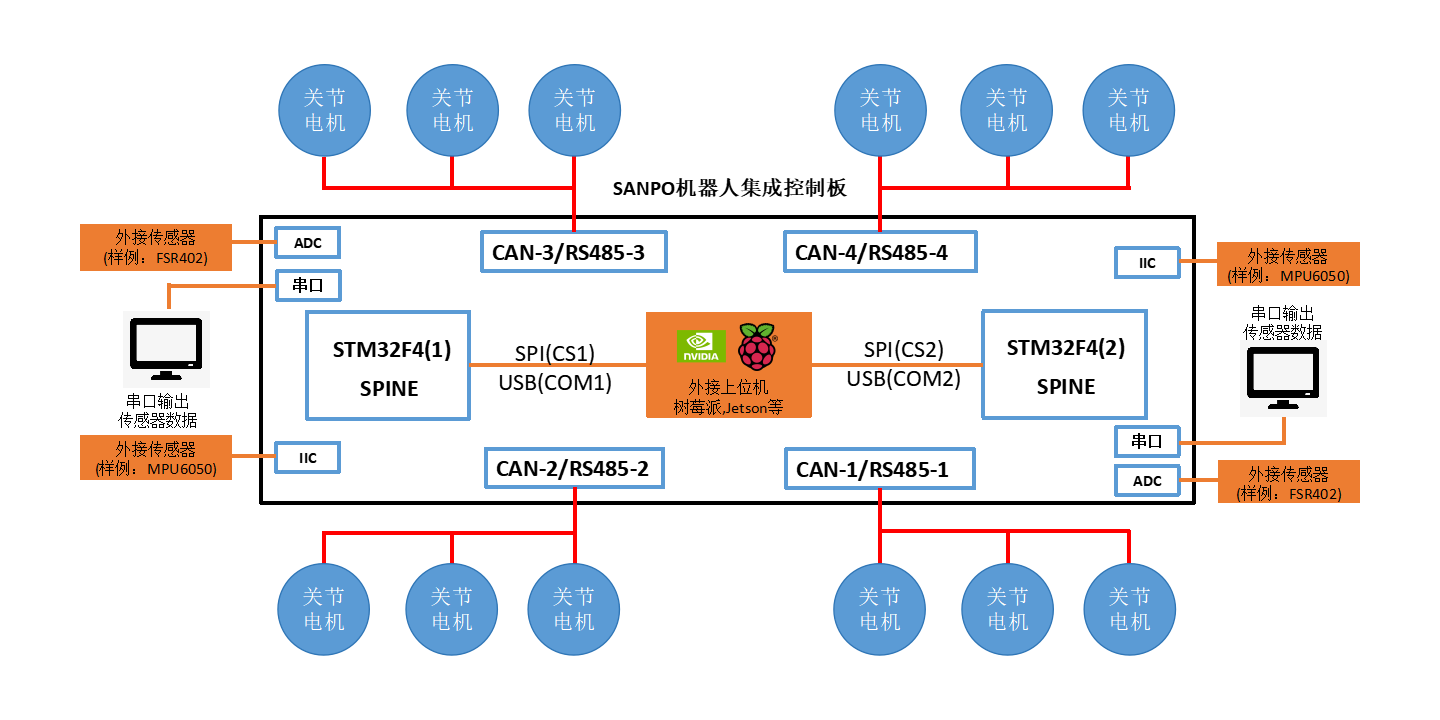
开发板架构
SANPO 机器人集成开发板采用双路高性能 STM32 MCU 控制核心,提供统一的软件开发方式和接口使用方式。
开发板集成 2 个 STM32 MCU 模块。
单侧关节链路作为一路总线通道,与对应 STM32 MCU 模块进行通信。
一个 STM32 MCU 模块负责一侧链路控制,两个模块共同完成整板的多路总线通信与任务调度。
根据 MIT Cheetah SPINE 的设计思路,多路电机控制可满足高频控制需求。
串口、IIC、ADC 等外设接口分配到两个 STM32 MCU 模块,便于传感器扩展与数据采集。
支持通过 SWD 接口进行固件下载和调试,SWD 接口 1、2 分别对应两个 STM32 MCU 模块。
通过 SPI 与开发板通信时,可通过片选信号分别访问两个 STM32 MCU 模块。
供电架构
支持 6V~58V 电机系统供电,控制系统支持 USB、5V 接线座或上位机 5V GPIO 供电,并可对外提供 6V~58V 和 3.3V 电源输出。开发板同时提供 4 路独立 CAN 和 4 路独立 RS485,适合混合总线调试、功能验证和快速开发场景。
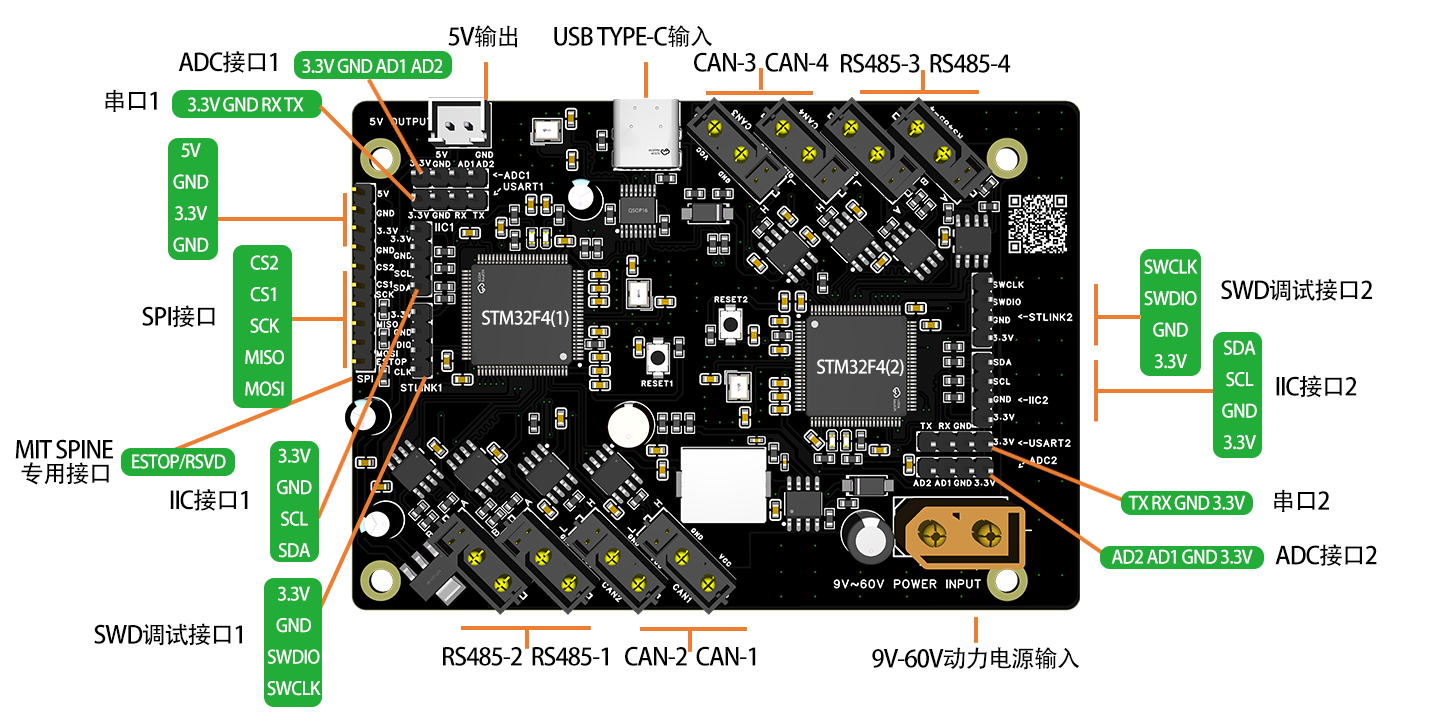
开发板接口图
具体接线时,请以开发板实物丝印和接口定义为准。
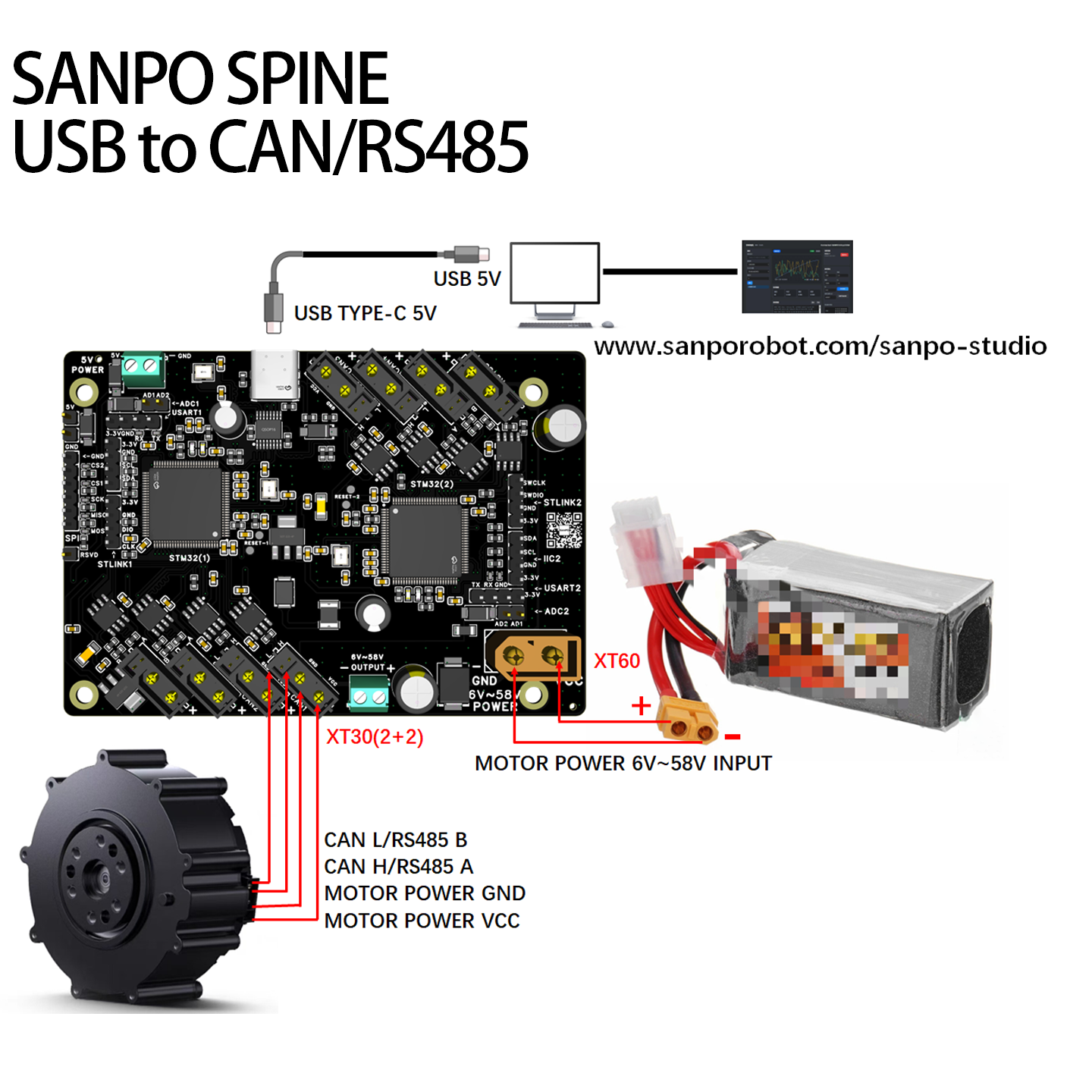
USB 接入(PC / 上位机调试)
USB 适合用于 PC 调试、联机控制和功能验证。通过 USB 接入后,可直接使用对应电机调试软件完成 CAN 或 RS485 电机通信测试。
USB 是上位机接入方式。
可根据电机协议选择 CAN 或 RS485 总线接线方式。
可结合 SANPO Studio 或电机原厂调试软件进行使用。
在 Linux 主机上使用支持 SocketCAN 的 V4.6 及以后固件时,也可以通过
canX网络接口直接收发经典 CAN 报文。
SPI 接入(主控板示例)
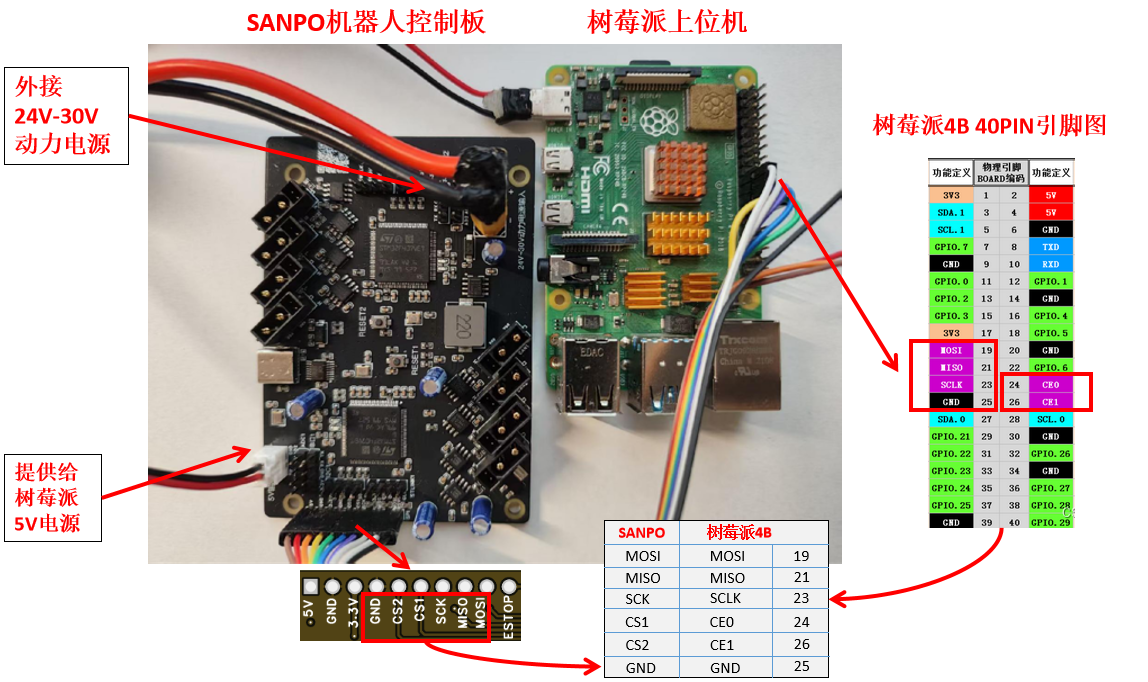
SPI 适合用于上位机主控与开发板之间的高速通信,例如 Jetson Nano、树莓派等主控平台。
SPI 作为控制输入时,CS1 对应 STM32 MCU(1)模块,CS2 对应 STM32 MCU(2)模块。
Jetson Nano 和树莓派仅作为接线示例,其他主控板只要 SPI 引脚映射一致,接线方式相同。
电机侧可根据实际电机协议选择 CAN 或 RS485 总线连接方式。

1. Jetson Nano 接线

2. 树莓派接线
调试软件
建议根据电机类型和调试方式选择对应软件:
SANPO 关节电机调试软件(支持各类标准关节电机):Sanpo Studio Motor Tools
小米电机官方调试软件(USB 转 CAN):小米 CyberGear 调试软件
宇树电机官方调试软件(USB 转 RS485):宇树 GOM8010 调试软件
Linux SocketCAN 常用工具:
can-utils
注意事项:
CyberGear 调试软件保存路径中不能包含中文,否则软件可能无法启动。
使用官方电机调试软件时,请确认接线方式和电机协议类型匹配。
若需要统一调试不同标准关节电机,优先尝试 SANPO Studio。
协议与示例代码
标准版支持 USB、SPI、串口和 SocketCAN 等上位机控制方式,并可接入 CAN / RS485 总线关节电机。
CAN 总线控制
相关入口:
RS485 总线控制
相关入口:
脱机执行功能
相关入口:
固件与二次开发
如需进行自定义固件、协议扩展或传感器接入开发,建议优先基于 SANPO 原厂固件进行二次开发。
原厂固件(可二次开发):STM32CubeIDE 项目工程
MIT Cheetah SPINE 固件(学习与兼容参考):MBED STUDIO 项目工程
关于 MIT Cheetah SPINE 固件,建议注意以下几点:
更适合作为兼容参考或学习用途,而不是默认出厂使用方案。
不支持 USB 和传感器接入。
不完全覆盖当前标准版的全部能力。
如涉及正式项目或传感器扩展,优先使用 SANPO 原厂固件。
固件更新要点,详见 固件更新:
使用 STLINK 连接板载 STM32 MCU 的 SWD 接口。
使用 STM32CubeProgrammer 刷写最新固件。
两颗 STM32 MCU 需要分别刷写对应固件。
使用注意事项
根据实际电机协议选择 CAN 或 RS485 电机总线类型。
使用前请先确认供电方式和接线方案。
若需要传感器接入或稳定的二次开发基础,建议优先使用 SANPO 原厂固件。
SPI 通信场景下,两个片选分别对应两颗 STM32 MCU,使用时请注意主控侧片选配置。
接线和供电请以开发板丝印和实物接口定义为准。