固件更新
SANPO原厂固件更新
准备工作
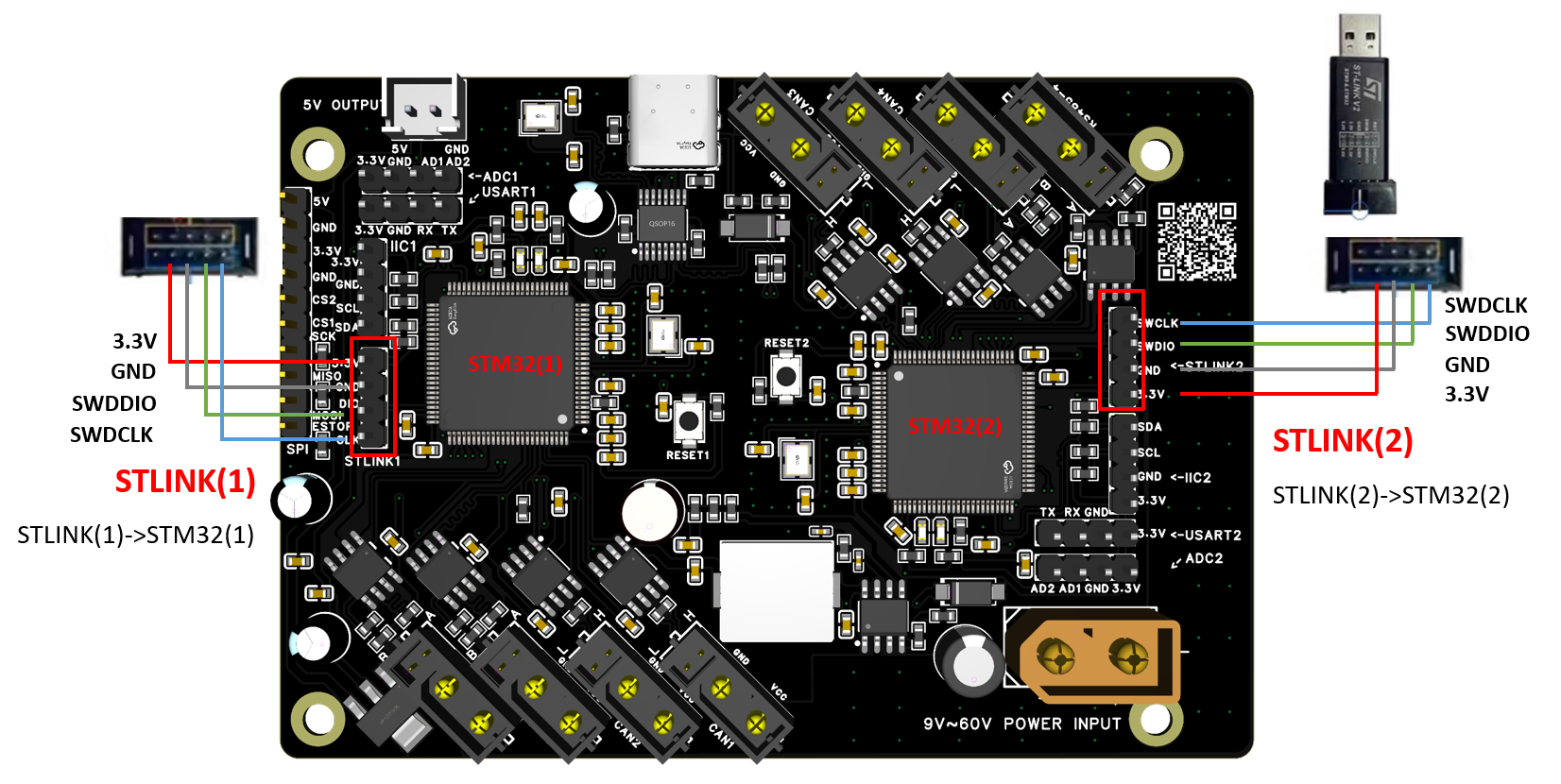
准备STLINK(SWD)下载器,连接开发板STLINK接口与电脑
开发板有两个STLINK接口,分别对应两颗STM32F407芯片,需分别更新固件 注意:开发板需要使用USB供电,板载3.3V为输出电压
更新步骤
安装工具
下载并安装ST官方烧录软件:STM32CubeProgrammer获取固件
下载最新原厂固件:sanpo_robot_spine_board_firmware-v4-latest.bin烧录固件
使用STM32CubeProgrammer将固件刷入开发板(两颗芯片需分别操作)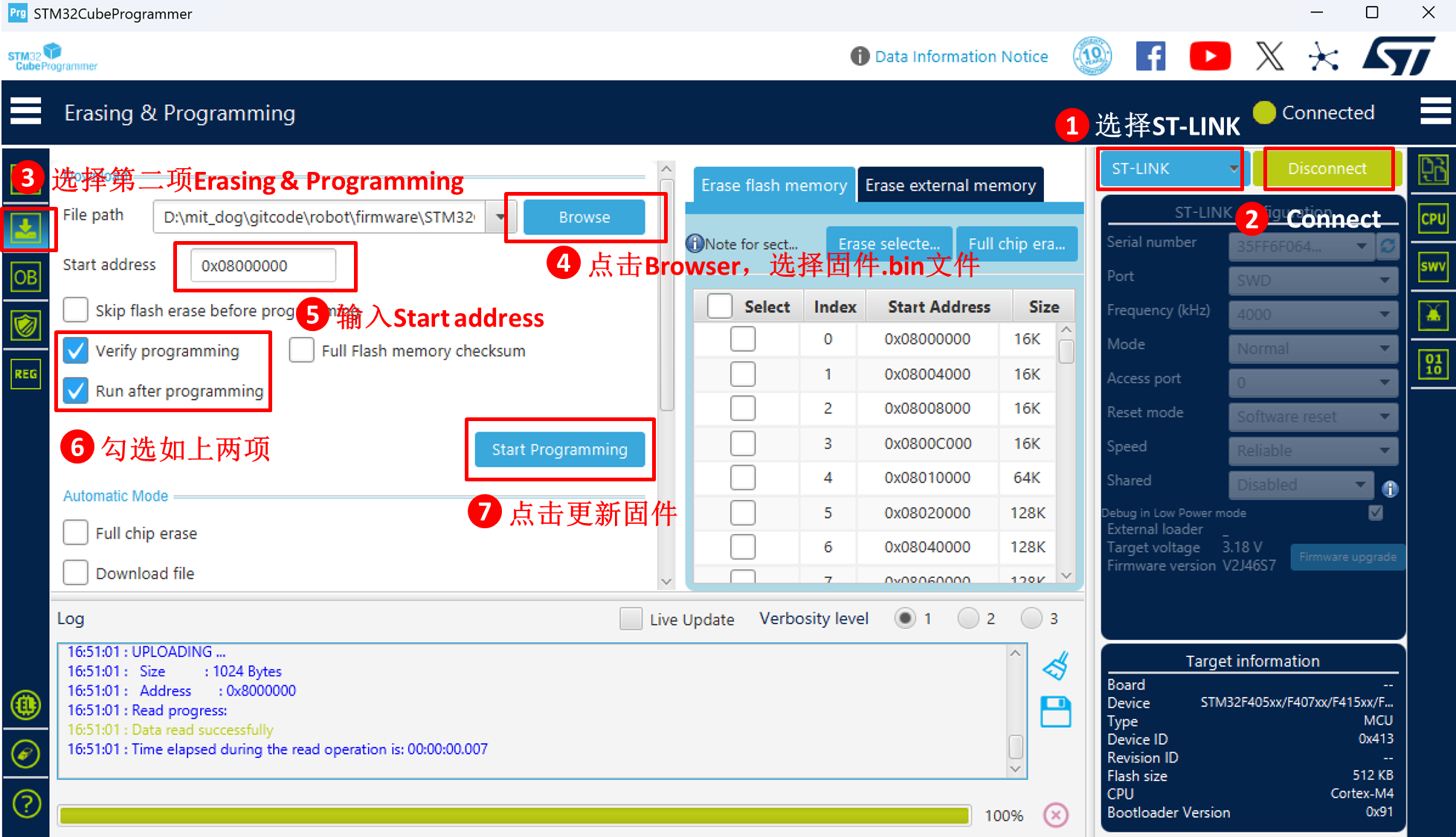
确认版本和接口
支持 SocketCAN 的 V4 固件建议使用
V4.6或更新版本。烧录完成后,可以通过 USB CDC串口工具发送AT+VER查询固件版本,V4.6 固件会返回V46。使用串口工具时只输入AT+VER,并将发送结束符设置为CRLF。在 Linux 主机上,也可以通过以下命令确认 SocketCAN 接口是否枚举成功:
sudo modprobe gs_usb ip link show type can
通过 USB 接入后,通常会出现 4 个
canX接口。
MIT Cheetah SPINE固件更新
推荐方案: mbed studio工程(需下载mbed-os.zip并解压至工程文件夹)
提示:注意文件目录结构不要嵌套多层mbed-os,不然会找不到targets。文件结构推荐 mit_spine_mbed_studio/mbed-os/targets。
更新步骤
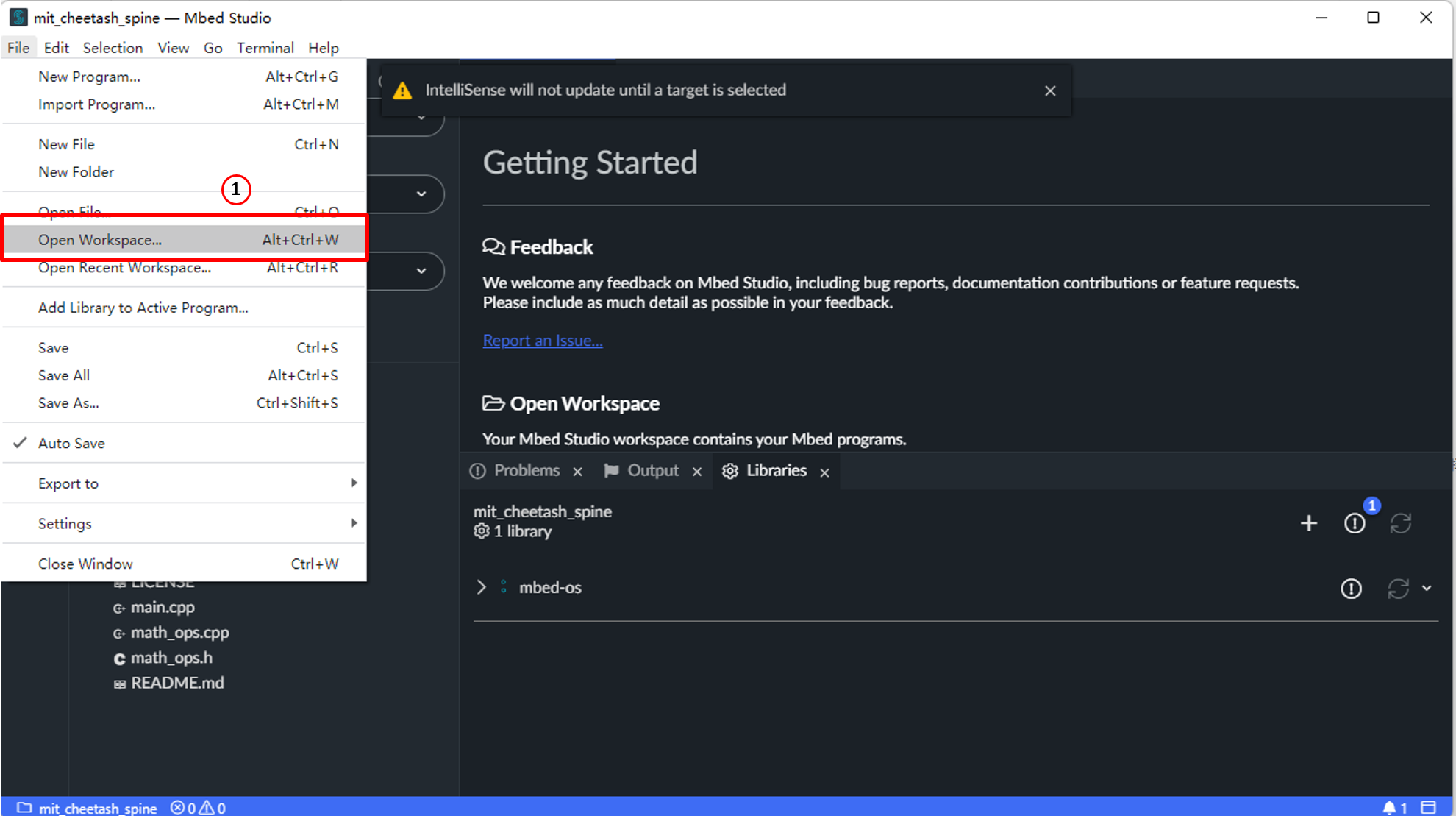
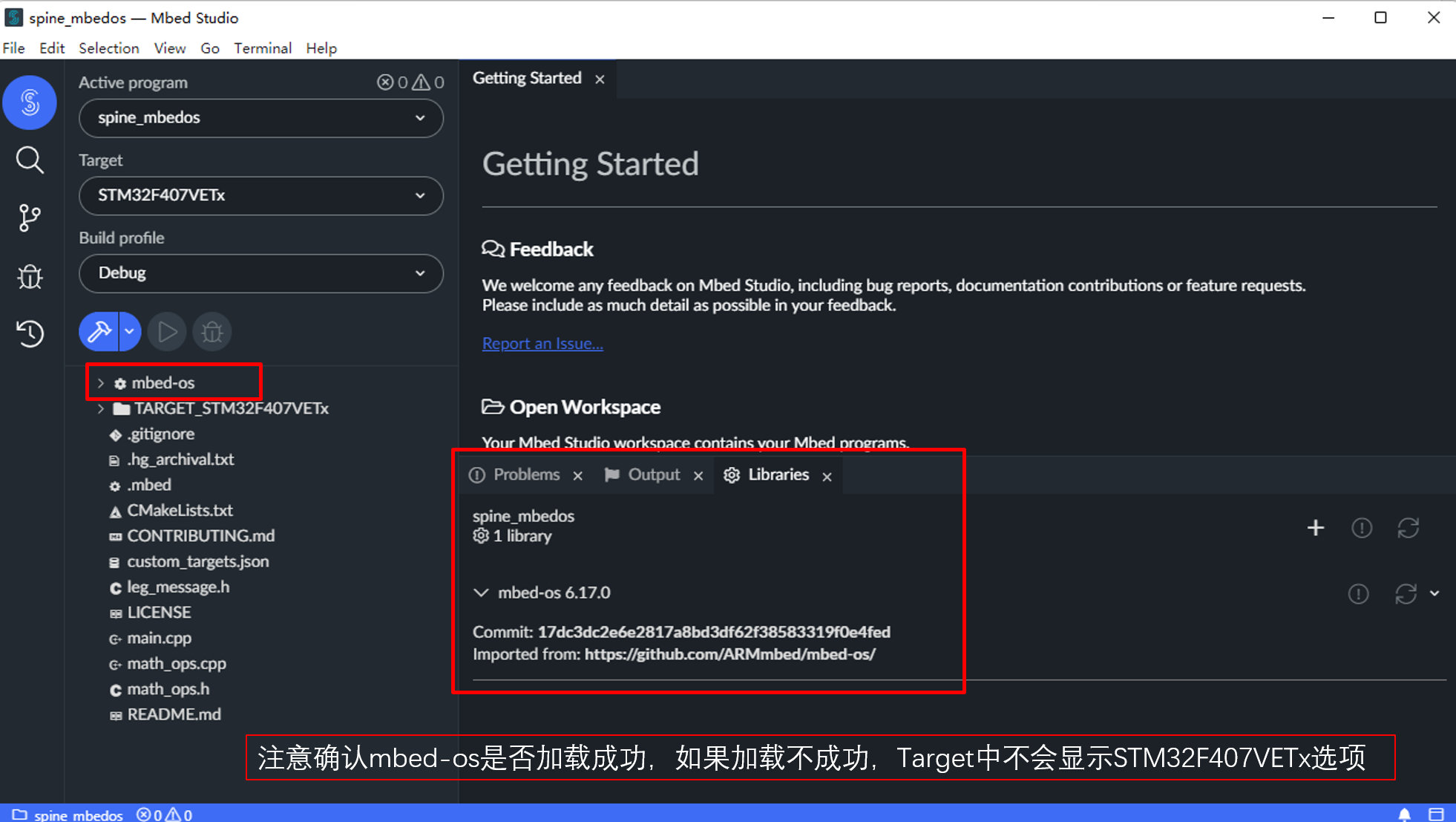
打开MIT固件源代码工作区
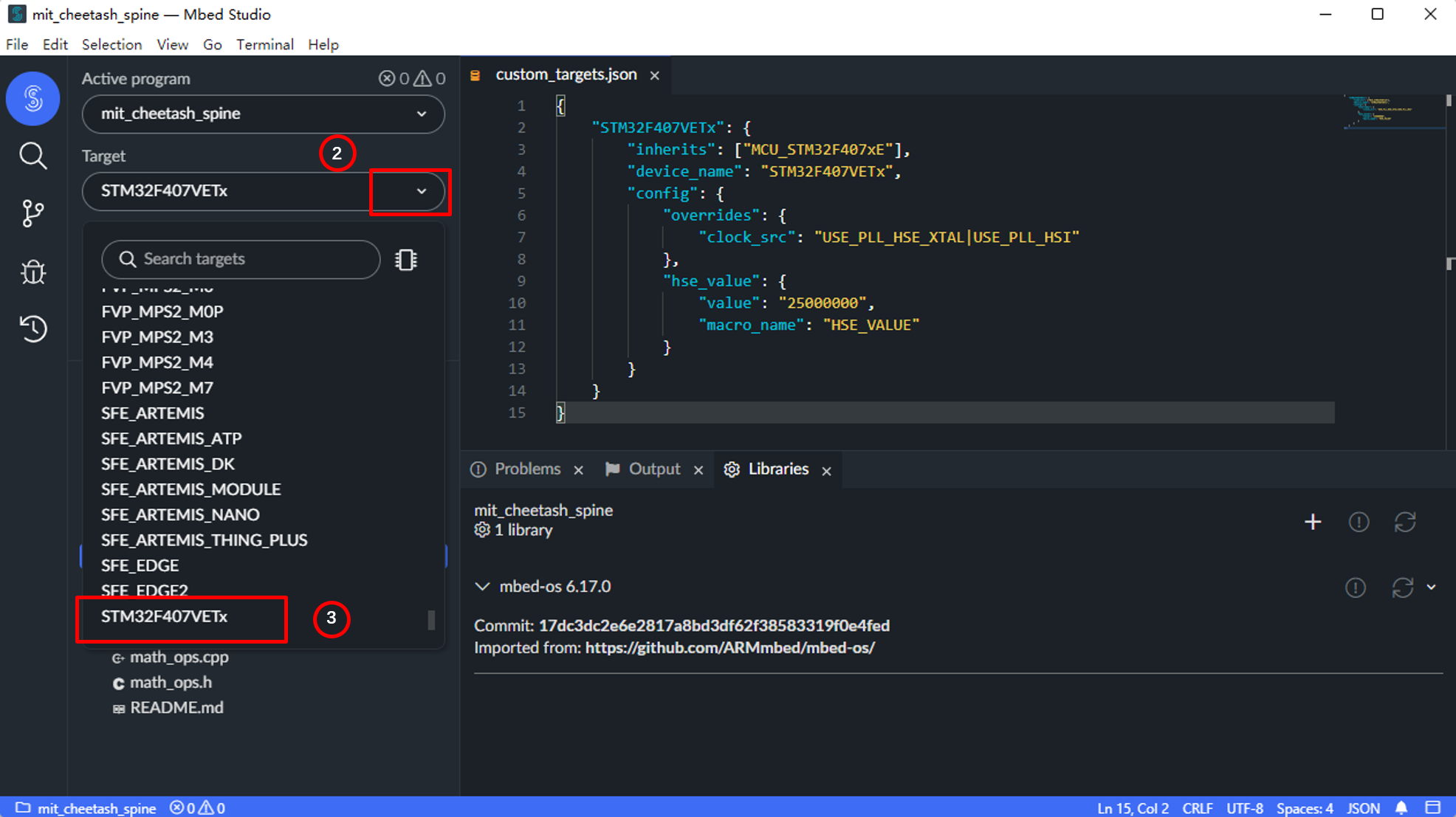
连接STLINK,选择目标芯片:STM32F407VETx
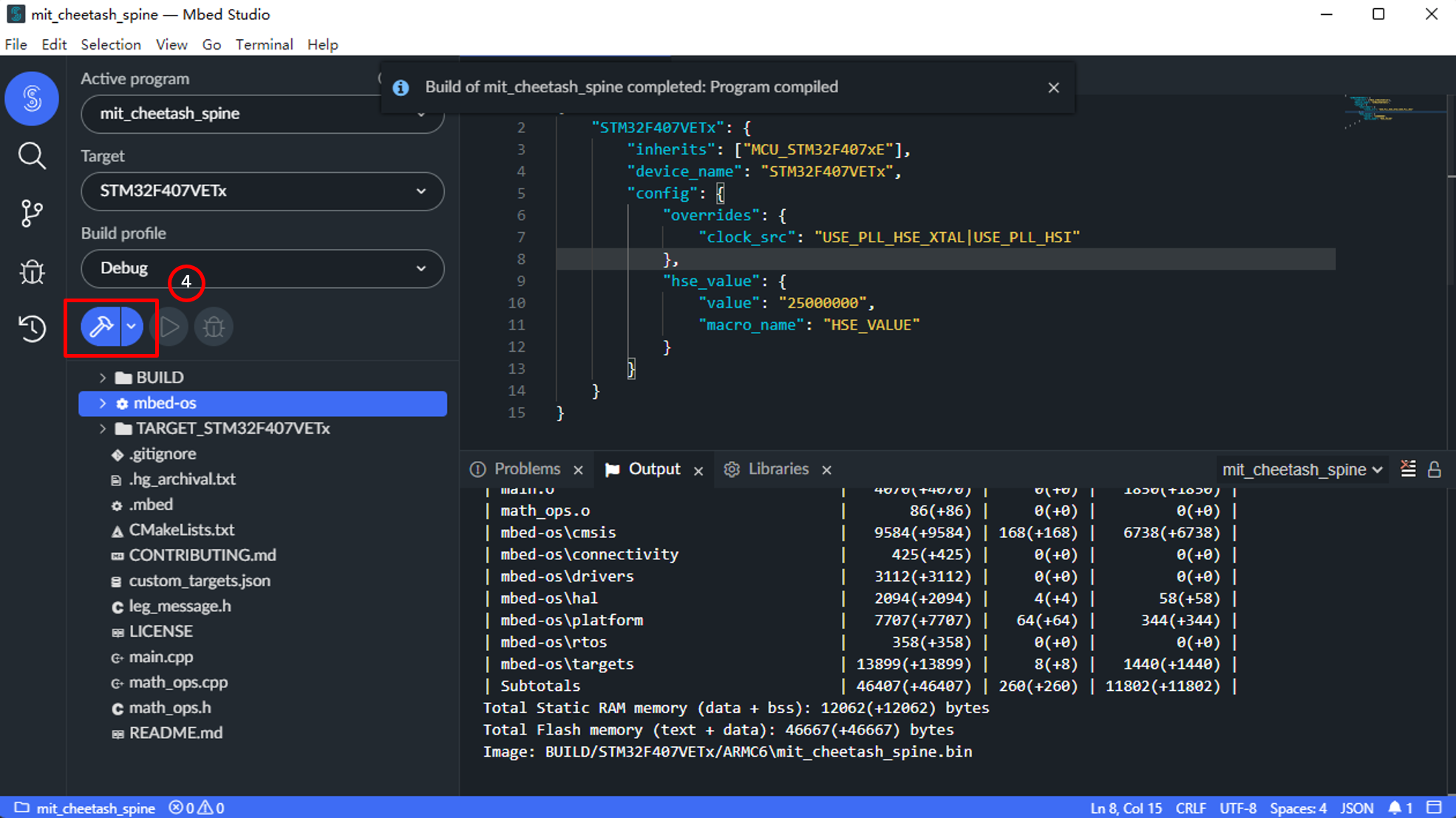
点击Build program编译并烧录
另外,如果使用Keil工程,同样需要把mbed-os.zip解压到工程文件夹,不要嵌套多层mbed-os目录。
操作图示
Step 1:
Step 2:
Step 3:
Step 4:
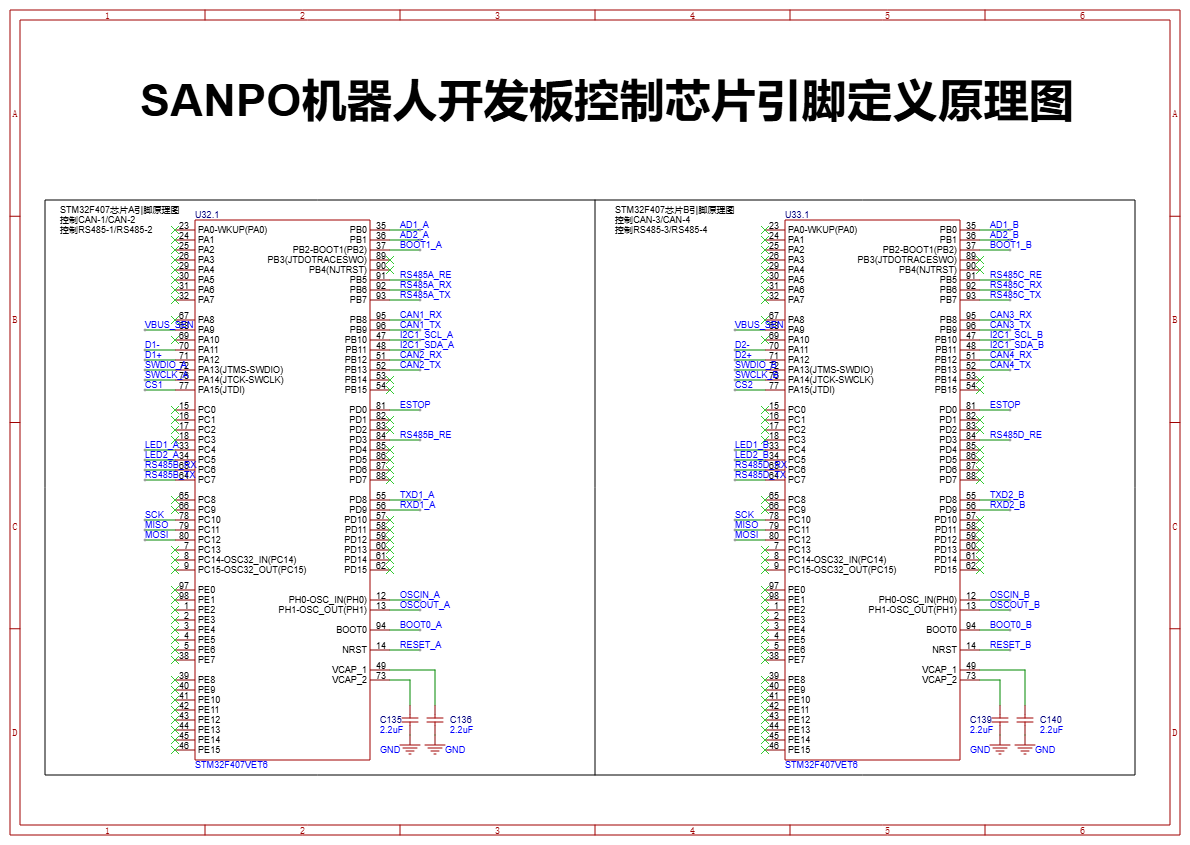
STM32芯片引脚定义
芯片1:STM32F407(1)
功能接口 |
引脚定义 |
对应STM32芯片引脚 |
|---|---|---|
ADC接口1 |
AD1 |
PB0 |
ADC接口1 |
AD2 |
PB1 |
串口1 |
TX |
PD8 |
串口1 |
RX |
PD9 |
SPI接口 |
CS1 |
PA15 |
SPI接口 |
SCK |
PC10 |
SPI接口 |
MISO |
PC11 |
SPI接口 |
MOSI |
PC12 |
预留接口 |
ESTOP/RSDV |
PD0 |
IIC接口1 |
SCL |
PB10 |
IIC接口1 |
SDA |
PB11 |
SWD调试接口1 |
SWDIO |
PA13 |
SWD调试接口1 |
SWCLK |
PA14 |
RS485-2 |
RX |
PC6 |
RS485-2 |
TX |
PC7 |
RS485-1 |
RX |
PB6 |
RS485-1 |
TX |
PB7 |
CAN2 |
RX |
PB12 |
CAN2 |
TX |
PB13 |
CAN1 |
RX |
PB8 |
CAN1 |
TX |
PB9 |
芯片2:STM32F407(2)
功能接口 |
引脚定义 |
对应STM32芯片引脚 |
|---|---|---|
ADC接口2 |
AD1 |
PB0 |
ADC接口2 |
AD2 |
PB1 |
串口2 |
TX |
PD8 |
串口2 |
RX |
PD9 |
SPI接口 |
CS2 |
PA15 |
SPI接口 |
SCK |
PC10 |
SPI接口 |
MISO |
PC11 |
SPI接口 |
MOSI |
PC12 |
预留接口 |
ESTOP/RSDV |
PD0 |
IIC接口2 |
SCL |
PB10 |
IIC接口2 |
SDA |
PB11 |
SWD调试接口2 |
SWDIO |
PA13 |
SWD调试接口2 |
SWCLK |
PA14 |
RS485-3 |
RX |
PB6 |
RS485-3 |
TX |
PB7 |
RS485-4 |
RX |
PC6 |
RS485-4 |
TX |
PC7 |
CAN3 |
RX |
PB8 |
CAN3 |
TX |
PB9 |
CAN4 |
RX |
PB12 |
CAN4 |
TX |
PB13 |
硬件架构设计
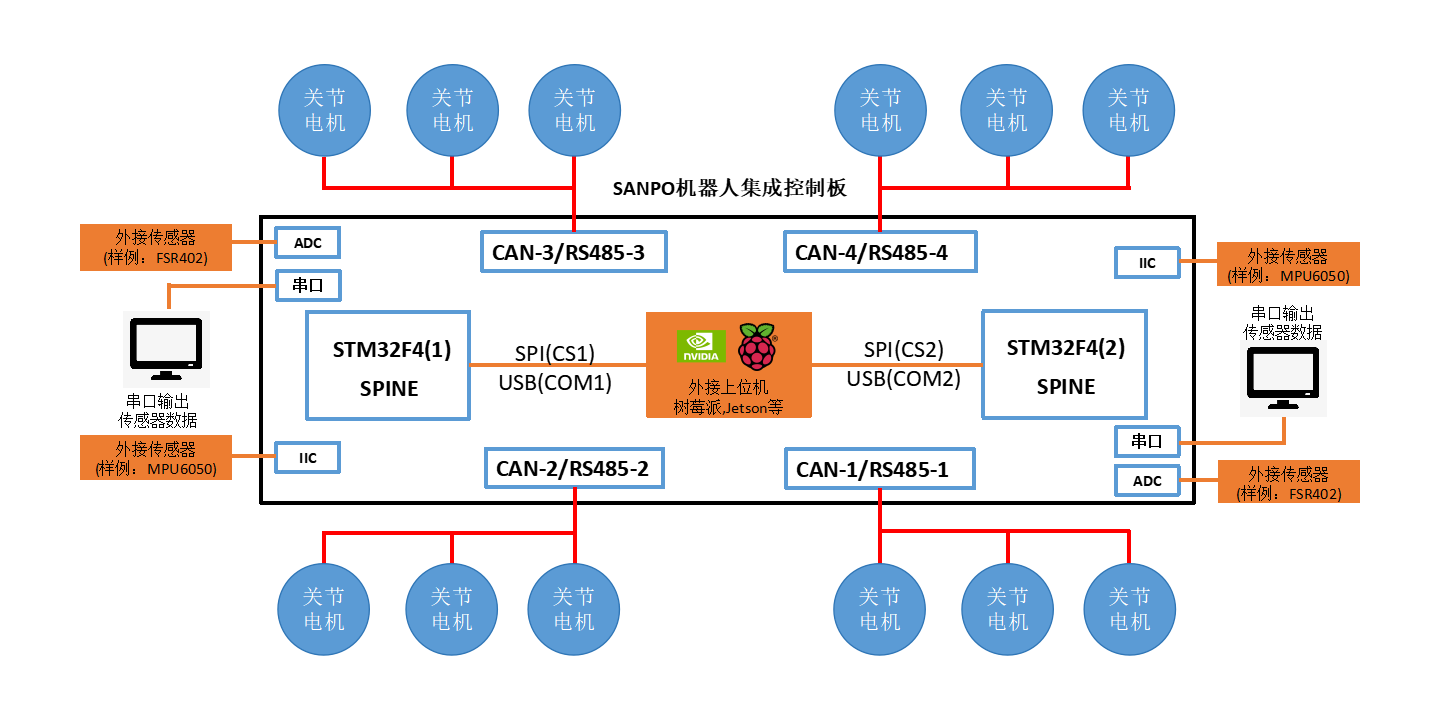
电路原理图